Poster
Client Context
Amazon Robotics (AR), located in Boston, Massachusetts, is a robotics manufacturer under the Amazon umbrella which manufactures and supplies robotics technology and software for Amazon warehouses. Formerly known as Kiva Systems, Amazon Robotics was purchased by Amazon in March of 2012. Kiva Systems originally gained recognition for its use of robots which moved supplies around distribution centers through fleets of mobile robots rather than relying on traditional conveyor systems for movement within warehouses. This allowed distribution centers with Kiva's Robots to remain flexible and reduce travel distances of goods within a warehouse. After being acquired and rebranded in 2012, Amazon Robotics began solely developing robotic solutions for Amazon warehouses and distribution centers. Today, Amazon Robotics continues to develop robotic technology to increase automation in their warehouses and distribution centers. Their primary goal is to simultaneously reduce cycle times and variability in the increasingly complex system that is Amazon. This is primarily accomplished through the use of autonomous robots (Drive Units), which move shelving units (Pods) to the workers instead of workers moving through a warehouse to collect items for shipment.
Project Objective
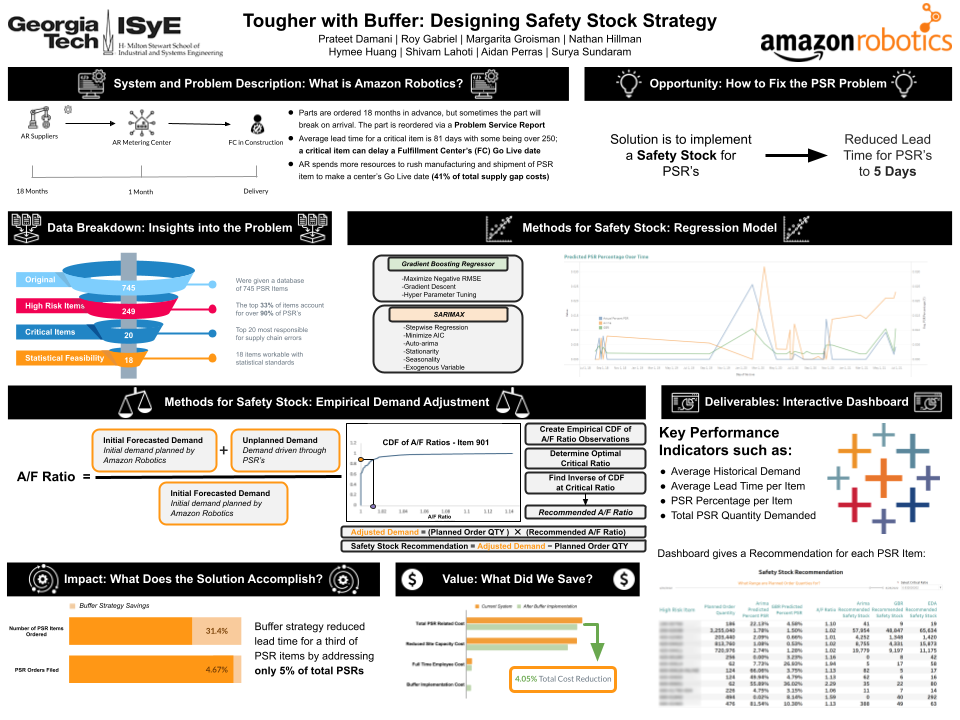
The project's opportunity lies in two major areas. First, Amazon Robotics does not measure the accuracy of the initial Plan of Record, leading to little to no information on the accuracy of their demand planning. Second, Amazon Robotics faces the issue of problem service reports; a problem service report is submitted whenever an item (robot, pod, supporting component, etc.) is delivered to a fulfillment center in construction and is broken. A problems service report (PSR) is submitted to trigger a new order for an item or component. However, this problem service report system has associated delays and costs that could be solved by holding safety stock for items that have had a high number of problem service reports in the past. These same items with high occurrences of problem service reports led to Amazon Fulfillment Centers going live on partial capacity(utilization); therefore, our project objective is to increase the partial capacity(utilization) by holding safety stock for items with high occurrences of PSR's in the past.
Design Strategy
The team has implemented two approaches in order to provide an optimal safety stock recommendation for each PSR item. Both approaches take planned order quantities for an item over a three month period as an input. Grouping planned orders on a quarterly basis rather than determining safety stock on a site by site basis pools the variability of PSR's that are expected to be experienced. Furthermore, grouping orders on a quarterly basis is in sync with the financial statements and planning done by Amazon Robotics.
Deliverables
The first approach seeks to estimate the PSR occurrences using a modified version of the Newsvendor Model. This approach consists of developing a demand inaccuracy distribution using actual to forecast ratios for each PSR item. Next, the process finds an optimal critical ratio using a testing set of data from quarter four in 2021. The combination of the optimal critical ratio and demand inaccuracy distribution for each item are then used to make safety stock recommendations for each item in future quarters. The second approach is regression-based and is significantly different from the Empirical Demand Adjustment (EDA) method as AR hopes to account for a variety of factors that relate to PSR demand and have the solution be self-improving. Furthermore, the current regression method tested multiple models while training on historical data and testing the first quarter of 2022 data. This has allowed the team to determine the best possible methodology for forecasting demand, and compare results with the EDA strategy. Finally, to combine both of the approaches, a Tableau dashboard was created to better understand PSR items, their causes, and trends, as well as an output of how much safety stock to keep for each item.
Project Information
Student Team
- Damani, Prateet
- Gabriel, Roy
- Groisman, Margarita
- Hillman, Nathan
- Huang, Hymee
- Lahoti, Shivam
- Perras, Aidan
- Sundaram, Surya
Faculty Advisor
Faculty Evaluator
